针对大型风电机组电动变桨系统与主控制器的实时通信问题,利用Modbus协议设计了基于RS--485通信系统。重点分析了通信数据与Modbus协议标准功能码的映射,给出了主机通信程序和从机通信程序。实验结果表明,基于Modbus协议的通信网络可靠地实现了主控制器(主机)和三个桨叶伺服控制系统(从机)间的相互通信,可满足风机桨叶控制系统的通信功能需求。
1、引言
风电机组控制系统的设计开发是风电机组整机设计开发的最大难点之一,关键的核心控制技术主要包含主控制器和变桨距控制器两大核心部件之一。当前的变桨距系统主要有液压驱动和伺服电机驱动两种方式,伺服电机驱动以其特有优点成为当前国外的主要变桨距驱动方式。变桨控制器的用途是风机在高风速情况下,通过调节风力机节距角口,维持机组发电功率输出恒定。本变桨装置选择采用由高精度三闭环伺服构成的硬件系统,系统精度高,易维护。同时选择合适的通信协议来使主控制器与三个桨叶驱动器协同工作。Modbus协议简单,方便易用,性价比高,传输有高速、高效等优点,且其对硬件要求简单经济,用它来实现主控器与变桨驱动器之间通信,可有效地降低装置的生产成本。
2、变桨控制器通信网络结构和功能
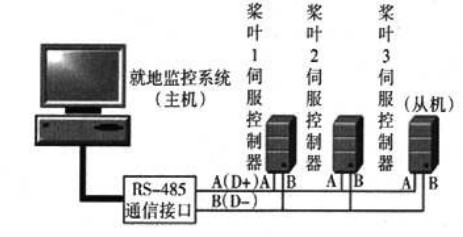
风机就地监控系统(上位机)通过现场总线与轮毂中电动变桨控制器进行通讯,可以同时对三个桨叶的变桨驱动器进行控制。根据风速,发电机功率和转速等相关量,将命令值发送给变桨驱动器,同时变桨驱动器(下位机)也可以将运行产生的状态反馈到上位主控器。上位机监控软件方便直观,能够清晰地读取风机各桨叶的运行情况。
电动变桨下位机必须能够快速响应主控制器的命令3个浆叶的电动变桨伺服系统分别具备高性能的同步机制安全可靠等要求,互相独立.下值机系统能够完全满足通信的快速性和町靠性的要求。3个电动变桨伺服控制器构成的下忙机具有的功能是位置伺服功能,采用转于磁场定向运算,完成位置、速度和电流=闭环控制,在停机或在正式运行前对电机的有关参数进行辨识并以此为基础对控制参数进行整定,减小阵风引起的转矩波动峰值.能减小风轮的机械应力和输出功率的渡动,避免共振.正式运行前对输入、输出和采集通道进行控制,具有功能完善的调试软件,可能进行参数设置,避免共振,具有紧急安全链,有实时通信功能。图1所示为整个电动变桨控制器通信网络的结构框图。
图1 电动变桨系统通信网络结构框图
3、Modbus协议在变浆系统通信中的应用
3 1 MMhus通信原理
Modbus是一种简单的仿‘客户机服务器”型应,H协议.其实质就足主小模式,不过主机是客户机.从机是服务器。其通倩遵循以r的垃程:①客广端准备请求并向服务器发送请求;②服务器分析并处理客户端的请求.然后向客户端发送结果;③如果出现任何差错.服务器将返回一个异常功能码.在无差错和异常响应下的通信过程分别如图2和图3所示。
3.2通信数据与Modbus协议的标准功能码的映射
车系统采用MMbus协议的I/TU模式进行传输,采用vc++编写的^机界面和监控模块在系统
中为主机.而变浆伺服控制器模块作为从机.主机需要处理的通信数据为主机下发送给下位机的数据和从机上传给上位机的数据.发送的数据包括系统数据的设置(修改桨叶叶变化角度和浆叶运行速度)、对变桨控制器撵作的命令(上电、启动、停机、紧急停机、断电)、修改变桨柜器件动作的命令(刹车、主电源、后备电源安全链闭合散热、加热、使能),上传给手机的数据有机组参数(直流母线电压电机温度、刹车状态、电流传感器)、桨叶数据(桨叶当前角度、桨叶运行当前速度,冗余编码器角度).安全链状态(90度限位开关、0度限位开关、安全链正常闭合)、风机操作模式(停机模式满机模式、自动模式、手动模式)、停机状态(正常停机、紧急停机)、变桨柜状态(温度、电源、加热)、故障
信息(放障ID号、故障名称)、通信正常信号和桨叶同步性情况。Modbus处理的所有数据(位、寄存器)都是放置在设备应用储存器;实现设备中的数据组织的方法有多种,本系统采用的组织方式将数据块独立。由于不同块中的数据不相关,因此可采用不厕的Modbus功能命令来访问独立数据块。变桨控制器通信数据的相妯用与Modbus协议定义的标准功能码映射的描述如表I所示。
表1:通信数据应用与modbus协议定义的标准功能码映射表
下面以查询桨叶故障信息来说明整个风机通信的查询,响应过程。在本设计的变桨系统中,有1个主机,3个桨叶,故对应有3个从机,地址分别为01h,02h,03h。现在以从机1,地址为01h为例。主机查询命令请求查询帧的格式如表2所示。
表2发送命令帧格式
|
从机地址 |
功能码 |
起始地址 |
输入量 |
CRC校验码 |
|
01h |
04h |
0008h |
0001h |
A17h |
这条命令的功能为:读取桨叶l的故障信息,即从从机01h中读取寄存器30009的值。桨叶1相应的数据帧格式如表3所示。
表3响应帧格式
|
从机地址 |
功能码 |
起始地址 |
输入量 |
CRC校验码 |
|
01h |
04h |
02h |
0011h |
1F6CH |
这条相应帧所表示的意义为:寄存器30009里面的数据值为“0x0011”,即表示桨叶1出现了17号故障(信息传输超时故障)则主机将响应故障,所有桨叶顺桨到安全停止位置(880)。其中CRC校验码为“1F6Ch”。
3-3通信过程及分析
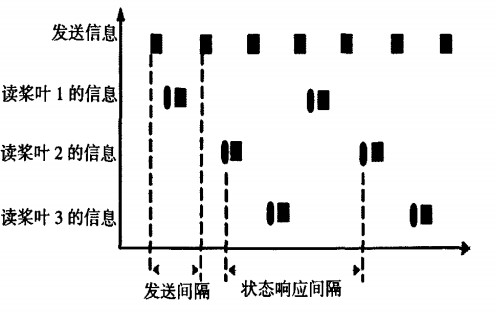
在整个通信过程中,人机界面和监控模块为主机,依次接收到3个桨叶(从机)的反馈信息,并不断发送查询3个桨叶的状态信息的命令。桨叶的伺服控制器作为从机,随时准备响应来自主机发送的命令,执行变桨等相关指令。为使通信的实时性良好,系统采用中断方式接收和发送帧。通信程序的构成主要分为:初始化、中断接收模块、帧
处理模块、CRC校验模块、寄存器刷新模块及通信控制模块等模块。其中通信波特率为19200bit/s。3个桨叶的伺服驱动器将同时接收到从上位机的命令,在主机发送桨叶信息的间隔里,3个桨叶依次将自己的运行状态回应到主机上。其中主机发送桨叶信息的间隔为40ms。3个桨叶分别响应状态
的时间间隔为120ms。通信时序如图4所示。
图4通信时序分析图
3.3.1主机通信程序设计
主机通讯程序采用基于多任务、可视化的Windows操作系统的开发环境,开发工具为VisualC++6.0,采用MSCOMM控件ActiveX实现通信端口发送和接收数据。主机的通信过程如下:打开串口,开始准备需要发送的数据,运行CRC生成子程序,获得需要发送数据的CRC校验码;运行组织报文帧命令构成完整的帧,以Modbus的RTU的方式
发送形成的报文;发送完成,进入接收帧的阶段,检测帧头(T1一T2一T3一T4),经过判断,符合四个字符的等待时间则进入等待接收中断的过程。若中断响应,进人中断服务子程序,接收发送上来的报文数据,对其进行CRC校验;若接收的命令符合要求,主机开始进入帧解析阶段,依据变桨通信协议完成通信数据分析,完成相关的显示和发送命令功能。处理完毕进入主程序,否则,报告通信错误,然后重新发送报文,发送完毕后进人主程序,进入数据准备阶段;若中断响应超时,程序进行超时处理,处理完成返回主程序,重新进人数据准备阶段。主机通信流程图如图5所示。
3.3.2从机通信程序设计
从机程序的开发环境为CCS3.3。从机的通信程序主要完成数据帧接收、CRC校验,同时响应主机的响应,执行相应的任务。刚开始,从机程序进入接收中断程序,中断模块开始接收主机发来的命令数据帧,并只有在一个完整的帧读完后,从机才开始对主机发送的命令进行处理。在从机报文处理模块中,首先,处理模块开始匹配帧头并调用CRC校验模块对请求帧进行运算,并将运算结果
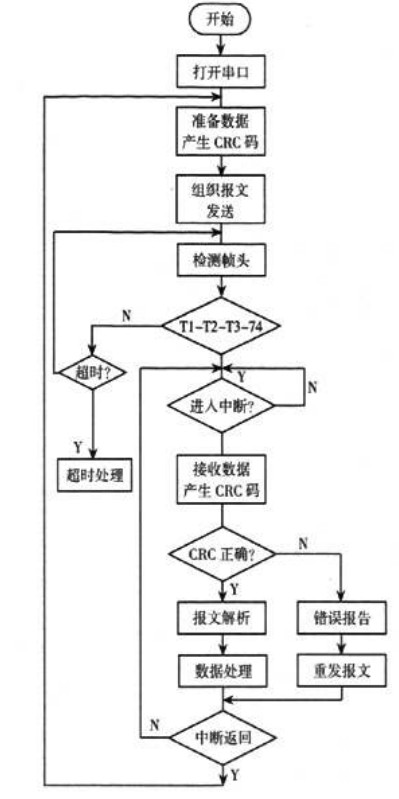
图5 主机通信流程图
与接收到的CRC值进行比较,若CRC校验出错.则退出处理帧模块,井放弃当前帻。这表明,从机接收到的此荣帧无效+从机继续等待主机的查询。只有丰机发送过来查询报文通过CRC校骑,从机才依据变桨掷泌进行下一步处理,并准备形成响应帧。响应帧的内容包古主机需要的信息。与此同时.从机再次调用CRC校验子程序.对响应数据进行校验.并将结果附在响应内容后面构成完整帧以便于主目b进行数据检查。同时,从机(变桨伺服控制器)将执行相应的变桨命令。在响应帧彤成之后,从机禁止接收中断,并使能发送中断.当从机数据发送完毕后,从机则使能接收中断,为下攻再次接收主机主机的查询命令做准备.从机通信程序如图6所示.
3,33实验分析
在变桨系统的地面实验平台上,打开风机就地监控软什(t机),将!个变桨装置盖接好.运行变桨程序。此时桨叶运行于自动模式状态.其中设置变桨的角度值为70度,系统运行时,桨叶速度为7.5度/s,下位机反馈信息都正常,安全链闭合,刹车打开。桨叶同步性良好。桨叶运行没有故体信息

4、结束语
由于Modbus协议具有标准性、简单高效、开放性好的特点,使其成为14前应削广泛的现场总线坼议之一。通过对系境运行的实验进行分析,结粜表明:风力发电变桨系统装置采用Modb.s协议进行通信.可靠地实现丁风机就地监控系统(主机)和3个桨叶控制系统(从机)的相互通信,人机交互友好,通信误码率低,抗干扰能力强,完全满足解决风机桨叶控制系统的通信功能需求,可获得良好推广。